Toyota Tacoma (2015-2018) Service Manual: Removal
REMOVAL
PROCEDURE
1. PRECAUTION
NOTICE:
After turning the ignition switch off, waiting time may be required before disconnecting the cable from the negative (-) battery terminal.
Therefore, make sure to read the disconnecting the cable from the negative (-) battery terminal notices before proceeding with work.
Click here .gif)
2. DISCONNECT CABLE FROM NEGATIVE BATTERY TERMINAL
NOTICE:
When disconnecting the cable, some systems need to be initialized after the cable is reconnected.
Click here
3. REMOVE REAR WHEEL
4. DRAIN BRAKE FLUID
5. REMOVE REAR BRAKE DRUM SUB-ASSEMBLY
Click here
6. REMOVE FRONT BRAKE SHOE
Click here
7. REMOVE REAR BRAKE SHOE
Click here
8. REMOVE REAR SPEED SENSOR
Click here
9. SEPARATE PARKING BRAKE CABLE ASSEMBLY NO. 3
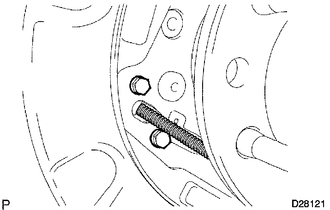
(a) Remove the 2 bolts and disconnect the parking brake cable from the backing plate.
10. SEPARATE REAR BRAKE TUBE NO. 8

(a) Using a union nut wrench, separate the brake tube, and use a container to catch the brake fluid as it flows out.
11. REMOVE REAR AXLE SHAFT WITH BACKING PLATE
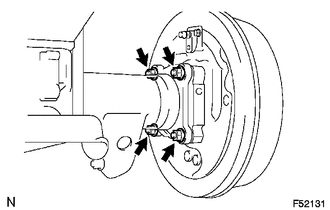
(a) Remove the 4 nuts and rear axle shaft with backing plate.
(b) Remove the O-ring.
12. REMOVE REAR AXLE SHAFT OIL SEAL
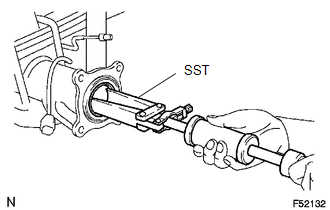
(a) Using SST, remove the oil seal.
SST: 09308-00010
 Inspection
Inspection
INSPECTION
PROCEDURE
1. INSPECT REAR AXLE SHAFT
(a) Using a dial indicator, measure the runout of the shaft and flange.
Maximum runout:
Shaft runout: 1.5 mm (0.0591 in.)
Flange runout: 0.05 m ...
 Installation
Installation
INSTALLATION
PROCEDURE
1. INSTALL REAR AXLE SHAFT OIL SEAL
(a) Using SST and a hammer, install a new oil seal.
SST: 09950-60020
09951-00770
SST: 09950-70010
09951-07150
2. INSTALL REAR AXLE ...
Other materials:
4wd Control Ecu
Components
COMPONENTS
ILLUSTRATION
Installation
INSTALLATION
PROCEDURE
1. INSTALL 4 WHEEL DRIVE CONTROL ECU
(a) Engage the 2 guides to install the 4 wheel drive control ECU.
(b) Install the 2 bolts.
Torque:
5.0 N┬Ěm {51 kgf┬Ěcm, 44 in┬Ělbf}
(c) Connect the 2 connectors.
2. INSTALL ...
Removal
REMOVAL
PROCEDURE
1. REMOVE FUEL TANK ASSEMBLY
Click here
2. DISCONNECT FUEL TANK MAIN TUBE SUB-ASSEMBLY
Click here
3. REMOVE FUEL PUMP GAUGE RETAINER
NOTICE:
Before performing these procedures, first cover the connectors and tube joints
of the fuel suction tube with pump and gauge ass ...
Multimedia system types
Entune Audio
Entune Audio Plus
Refer to the ÔÇťNAVIGATION SYSTEM OWNERÔÇÖS MANUALÔÇŁ.
Entune Premium Audio
Refer to the ÔÇťNAVIGATION SYSTEM OWNERÔÇÖS MANUALÔÇŁ.
...
